
Imagine a bustling factory floor or a disaster zone where hundreds of autonomous robots are tasked with clearing debris or assembling intricate machinery. Intuitively, one might assume that the more units deployed, the faster the job gets done. However, engineers have long grappled with the "bottleneck effect": as robot density increases, the workspace becomes a chaotic gridlock. Robots collide, block paths, and waste precious battery life navigating around one another.
A groundbreaking study led by researchers at Harvard University’s John A. Paulson School of Engineering and Applied Sciences (SEAS) has discovered a counterintuitive solution to this classic problem of swarm robotics. By introducing a controlled degree of "randomness"—or what the researchers call "noise"—into the movement patterns of individual robots, the team has found a way to maintain fluid, efficient motion even in highly congested environments.
The Core Challenge: The Efficiency Bottleneck
In the field of swarm robotics, the goal is often to emulate the efficiency of biological systems, such as ant colonies or schools of fish. These natural systems perform complex, large-scale tasks without a central commander. Yet, when humans attempt to replicate this in artificial environments, the "crowding limit" frequently leads to system failure.
"When you have too many agents in a limited space, you hit a threshold where the collective progress actually begins to decline," explains Lucy Liu, an applied mathematics Ph.D. student and lead author of the study. "The question we faced was: is there a mathematical way to define that limit, and can we manipulate the movement of individual units to push that threshold further?"
The findings, recently published in the Proceedings of the National Academy of Sciences, suggest that the answer lies not in more complex AI, but in a deeper understanding of statistical physics and self-organization.
A Chronology of Discovery: From Simulation to Reality
The research journey began with a fundamental shift in perspective. Instead of viewing each robot as a sophisticated machine capable of complex path-finding algorithms, the team treated them as "active matter"—simple particles interacting with one another under specific constraints.
Phase 1: Theoretical Modeling
The team, led by L. Mahadevan, the Lola England de Valpine Professor of Applied Mathematics, Organismic and Evolutionary Biology, and Physics, first utilized computer simulations to test the behavior of "agents" in a restricted environment. Each agent was assigned a random destination; upon reaching it, it was immediately assigned a new one, simulating a continuous, high-pressure work cycle.
Phase 2: Introducing "Noise"
The researchers experimented with varying levels of "noise"—the degree of deviation from a straight-line path. In the "zero noise" scenario, robots moved in perfectly straight lines toward their targets. While theoretically efficient, this led to immediate, rigid traffic jams as robots collided head-on or became boxed in. Conversely, "high noise" caused the robots to wander erratically, wasting energy and time.
Phase 3: The Goldilocks Zone
By systematically adjusting these parameters, the team identified a "sweet spot." In this range, robots were allowed enough randomness to navigate around minor obstructions without losing their overall trajectory. This balance allowed the swarm to remain "fluid" rather than "solid," preventing the formation of long-term traffic jams.
Phase 4: Experimental Validation
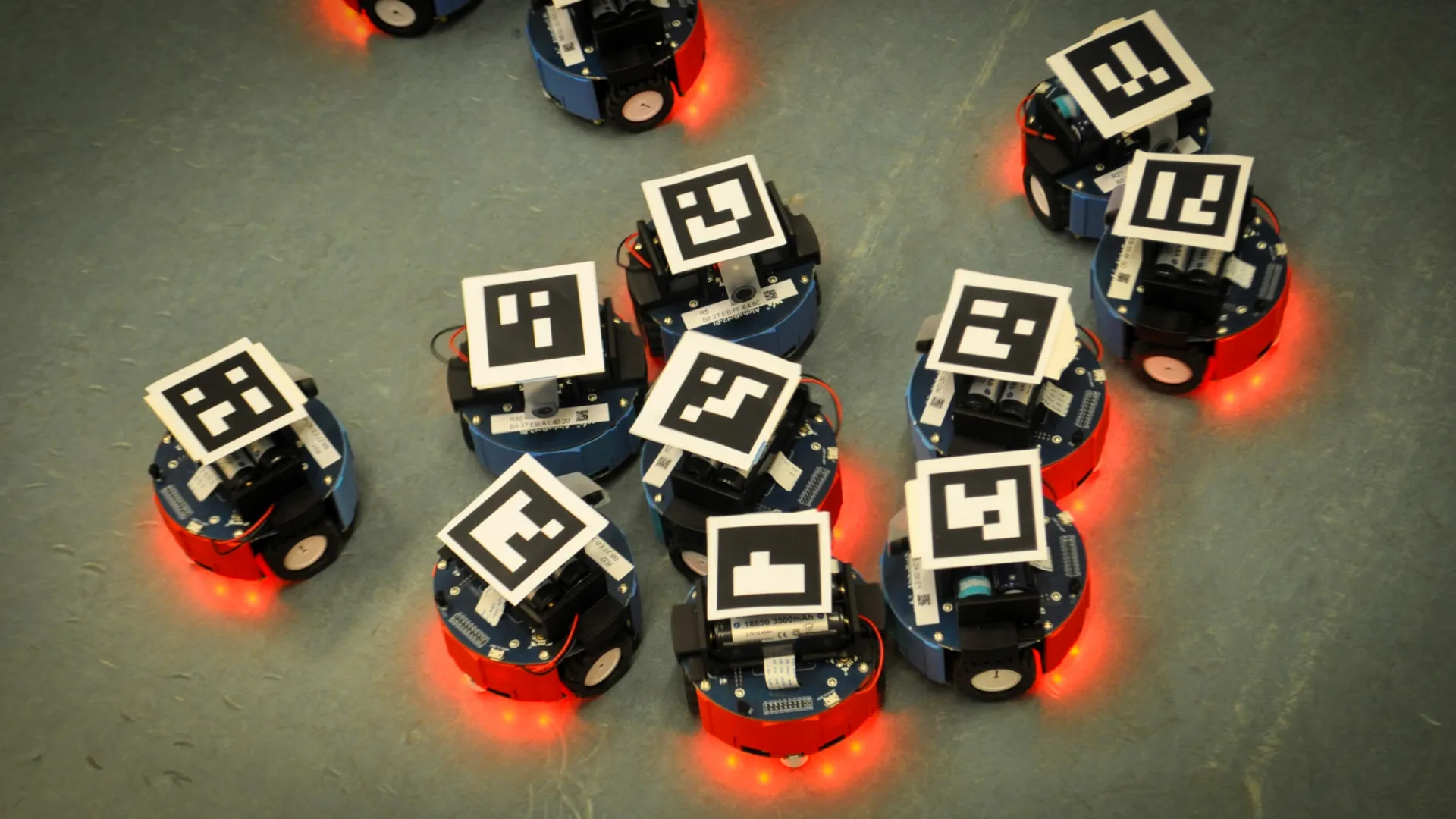
To prove the theory held up in the physical world, the team partnered with physicist Federico Toschi at the Eindhoven University of Technology. They deployed a fleet of small, wheeled robots in a laboratory setting, monitored by an overhead camera system. Each robot was tagged with a QR code, allowing the researchers to track position and performance in real-time. The results mirrored the simulations: the "Goldilocks" level of randomness significantly outperformed both rigid and overly erratic movement strategies.
Supporting Data and Mathematical Framework
The researchers developed a series of formulas to calculate the "goal attainment rate"—a measurement of how many targets were reached within a specific timeframe. These equations act as a predictive tool for engineers.
The data reveals that there is a non-linear relationship between robot density and movement efficiency. When robots are sparse, straight-line movement is optimal. As density reaches a critical point, the efficiency of straight-line movement drops exponentially. However, by adjusting the "noise" variable, the team found they could flatten this curve, maintaining consistent throughput even as the density of the swarm increased.
"This might be counterintuitive, because how could randomness make things easier?" Liu noted. "But when you introduce a controlled amount of randomness, the behavior of the system becomes easier to average. You can predict the aggregate movement of the swarm more accurately than if they were all trying to follow rigid, conflicting rules."
Official Perspectives: The Philosophy of Simple Rules
For L. Mahadevan, this research is about more than just robotics; it is about the physics of self-organization. "Understanding how active matter—whether it is a swarm of ants, a herd of animals, or a group of robots—becomes functional and executes tasks in crowded environments is a fundamental question in behavioral ecology," Mahadevan said.
The study emphasizes that "intelligence" in a swarm does not have to reside in the individual. Instead, it can emerge from the collective through simple local rules. By lowering the computational burden on the individual robot, the researchers have created a system that is more resilient and scalable.
Justin Werfel, a SEAS Senior Research Fellow who co-led the work, highlights the scalability of these findings. "If you don’t need every robot to possess high-level intelligence to navigate a crowd, you can build cheaper, simpler robots. You can deploy thousands of them rather than dozens, and the system as a whole will be more robust."
Implications: A Future of Optimized Motion
The implications of this research extend far beyond the laboratory or the factory floor. The ability to model and optimize movement in crowded spaces could have transformative effects on several key sectors:
1. Traffic Management
Autonomous vehicles (AVs) currently struggle with the "human" element of traffic, where unpredictability is the norm. The insights from this study could help engineers design AV algorithms that incorporate a "controlled wander" or specific interaction rules to prevent gridlock during rush hour.
2. Pedestrian Flow and Architecture
Designing public spaces—such as airports, stadiums, or emergency evacuation routes—requires an understanding of how crowds behave. By applying these mathematical models, architects could design environments that naturally "nudge" human crowds to move more efficiently, reducing the risk of crushing or bottlenecks.
3. Micro-Robotics and Medicine
In the future, medical practitioners may use "swarms" of nanobots to deliver drugs to specific sites in the human body. Navigating the crowded, complex environment of the bloodstream is remarkably similar to the challenges faced by robots on a factory floor. The findings on movement randomness could be essential in designing nanobots that can navigate through biological barriers.
4. Logistics and Warehousing
As e-commerce continues to grow, the density of robots in fulfillment centers will only increase. Implementing the "Goldilocks" strategy of movement could allow companies to squeeze more robots into the same footprint, drastically increasing the number of packages processed per hour.
Conclusion
The research from Harvard University serves as a powerful reminder that complexity is not always the answer to complex problems. In a world increasingly reliant on autonomous systems, the study suggests that we should look to the principles of physics and the elegance of simple, decentralized rules.
By embracing a little bit of chaos, we may finally be able to bring order to the increasingly crowded systems of the future. Whether in a computer simulation, a warehouse, or a city street, the lesson remains the same: sometimes, to move forward more quickly, it pays to wander just a little bit.
Research Funding Disclosure
This work was supported by the National Science Foundation Graduate Research Fellowship Program (Grant No. DGE 2140743), the Simons Foundation, and the Henri Seydoux Fund. The authors declare no competing interests.
